
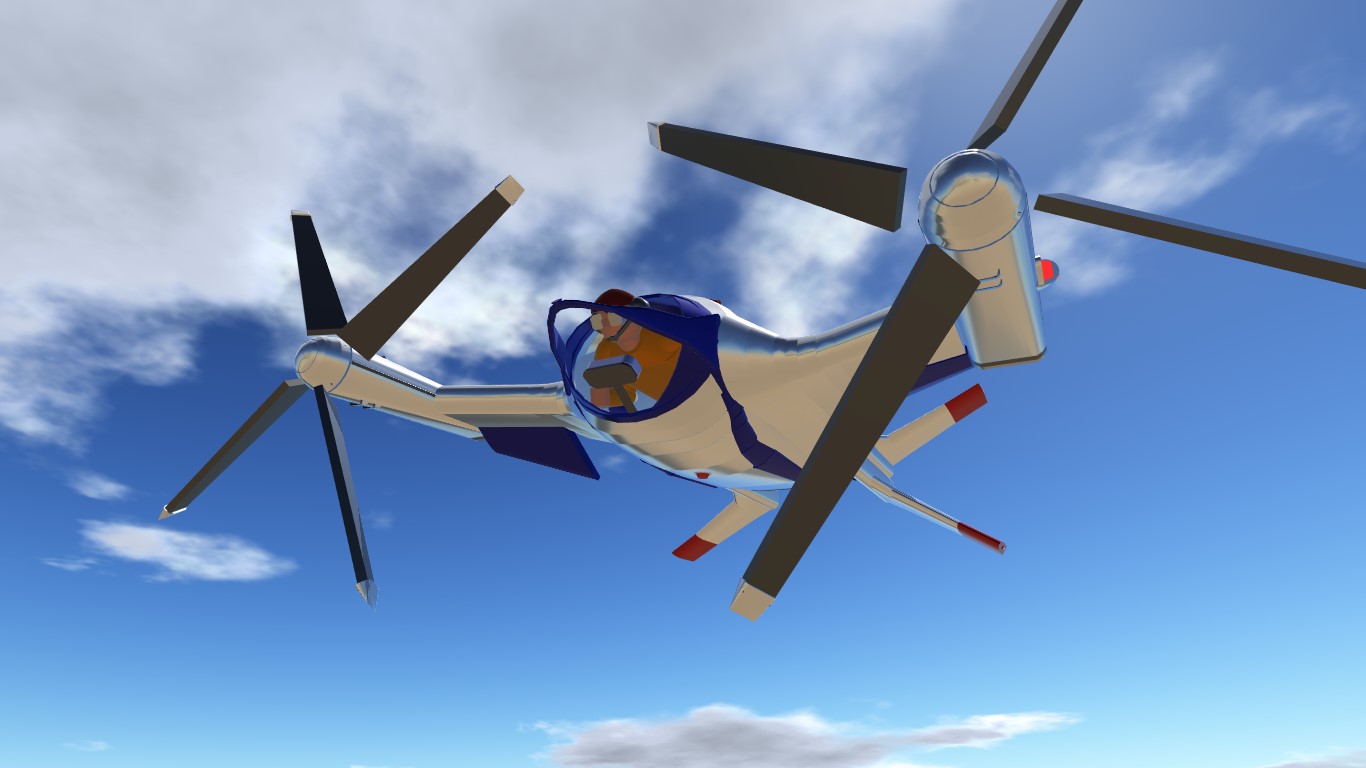



I present to you a device that could radicalize the way we think of personal transportation. A huge step for anyone who dreams of flying. The plan is based on Moore's doctoral dissertation for an ELECTRIC ULTRALIGHT VTOL that was also edited by NASA as "Puffin".
The aircraft is essentially a “tail-sitter”, it takes off vertically and part of its tail is divided to make the landing system. This model, although based on true original philosophy, has some differences. To simulate the use of non-fueled engines, rotors were used. As we know they can only operate at a steady speed, so to control thrust their propellers adjust the blade angle. In essence, it is like having a constand speed engine with variable pitch propellers. Another difference is that during vertical landing the yaw is controlled by changing the velocity of each coil. Unfortunately, this technique does not apply to SP, and the program can not generate and calculate the flow from the engines that would allow the auxiliary fins to control the descent at low speeds. As a consequence of the above, in the final landing phase it was chosen to use a gyroscope to handle ONLY yaw. The surface control system is also original, roll and pitch are controlled by the same surfaces in the tail. The yaw on horizontal flight is controlled by the logic of a “flying wing”, the rudder has 4 separate surfaces that move independently or coordinated as airbrakes. Landing gears work as decent stabilizers and the airplane also has automatic and realistic navigation lights.
The plane is made to travel up to speed of 134 miles. The vertical mode allows a + -20 degrees pitch and a maximum speed of 22 miles.

To take off put the VTOL to the maximum and use the throttle. Immediately after takeoff, close the landing legs with “G”. To land : use AG1, pull the airplane to 90 AoA. open the legs and gradually lower the Vtol. Also very important: cyclical downward movement is controlled by YAW. If at any time you have high speed you can activate the air brakes .
VTOL= blade pitch
Throttle= Charge of battery (range of airplane)
AG-1= Decent rudder
AG3=Airbrakes.
G=Landing gears - Decent stabilizer
YAW=Turns the plane in vertical mode on y axis.
This airplane is controlled as easily as a bicycle, it only shows instability in a fast barrel roll for which it is obviously not designed. I recommend everyone to try it. Let us illustrate the future of urban trasportation away from traffic and pollution.

Specifications
Spotlights
- This craft has been featured
- Dimkal 6.5 years ago
- Freerider2142 6.6 years ago
- BlackhattAircraft 6.6 years ago
- JohnnyBoythePilot 6.6 years ago
- BionicDragonYT 6.6 years ago
- Renameduser4 6.6 years ago
General Characteristics
- Created On Windows
- Wingspan 20.0ft (6.1m)
- Length 9.1ft (2.8m)
- Height 12.9ft (3.9m)
- Empty Weight 779lbs (353kg)
- Loaded Weight 779lbs (353kg)
Performance
- Wing Loading 2.3lbs/ft2 (11.0kg/m2)
- Wing Area 344.4ft2 (32.0m2)
- Drag Points 1691
Parts
- Number of Parts 269
- Control Surfaces 0
- Performance Cost 1,174


10.000 AMAZING DOWNLOADS in one month ! Thanks for your interest . Happy flights to all !
@Loopedpegasus79 well over 650 is much for my trusty pc, this is why my builds are lite. I believe that u can make great stuffs with simpler methods. Did you like the puffin ? It's little different from the other planes.
@Viper3000ad except when I'm trying to download that one F-16 model with 6000 parts lol
@Loopedpegasus79 Always, sp has a great physics engine
@Brendorkus physics have to be on high
@Brendorkus I have a small description , putt vtol up before you start the engines.
This is so hard to fly! How do you take off without blowing up?
@Viper3000ad Very fun to fly and a great job! Its easy to fly and sfter some try-and-error u can land it quite smoothly! Nicely done project, Im proud of u mate!
@dimcal Thanks for the vote and the spotlight. I'm glad to see you again, did you finally find some time to try it out? I would like your opinion on the control surfaces.
Τhank you for the vote and for following it is my great honor. Fantastic job with your Ferrari, it was my favorite. @tylerdeveneuxmusic
@Benslayer12 I have a description, but I land it somewhat differently. I go to the point at full speed, when I reach 200 meters away from it, I press AG1, put it vertically, open the legs with G and slow down decrease VTOL . You can also move on the hover mode with pitch and yaw. 4 from 5 times you can land in carrier with success . Happy flights and tell me if that helped.
It’s a really cool plane! The only thing is, i cant land. How would you land?
@atzh thank you for following ! Happy flights
Congratz on feature
@stargazzer thanks for the vote and for following. @tully2001 Thanks for the vote and for the feature. Happy flights everybody.
@CookiezR4milk putt vtol up before you start the engines. The torque from the blades destabilise the plane in the ground if left that way for a while. Oh and I suggest to start from a flat non moving surface. Although it is capable of carrier landings, the move of the ship at start,tilts the aircraft.
Whenever i try to take off it just blows up, even when i do the procedures
@galland thanks for the vote and for following. Happy flights
@Viper3000ad np, It's a really cool design.
and the weather is Hot and dry... perfect for the beach ;)
@freerider2142 thank you for the vote and the spotlight, how is the weather in beautiful eilat ?
@Nachog Easy type the following : ! [] (link), without spaces .
hello, a question, how can I insert a picture in the description of a plane
@Aerofy Thank your, let's shape the future of aviation. Who knows, maybe in a few years we can park our electric plane next to our bicycle. :-)
@Viper3000ad Great point. I've flown it, the handling of the vehicle is rather unique. Once you get used to it it feels pretty smooth though, and it goes straight as an arrow.
Thank you very much for your humorous comment, I understand your perspective. Several years ago we considered the art of driving a great thing, now we are even talking about robotic auto-driving. Perhaps the future in aerodynamics is automatic. Did you drive it? What did you think of it? @Aerofy