
tvc test 2. design change
this aircraft is sort of a work in progress, I felt like making this particular testbed available to the public
So far so ok
tvc feels like it needs work. Yaw axis is pretty janky but atleast I have its fly-by-wire working ok. Might as well get someone to test and critique. I your not me your probably the person i asked to test
to tester: To summarize, I followed the tutorial GuyFolk SP made over on his channel. It basically is tutorial on how to make a sort of fly-by-wire for thrust vectoring aircraft, there are things that still nedd fixing that i am aware such as yaw doesnt work right and trying to do a post stall loop can result in the plane rolling out of control
what I want basically are suggestions on what to do AND if you can find any other problems. Lastly; thanks for coming and testing it, really helps me out! And sorry if i sounded rude there, I just wanted to get to the point fast
Specifications
Spotlights
- V 4.8 years ago
- GuianLorenzo 4.8 years ago
- MrShenanigansSP 4.8 years ago
General Characteristics
- Created On Windows
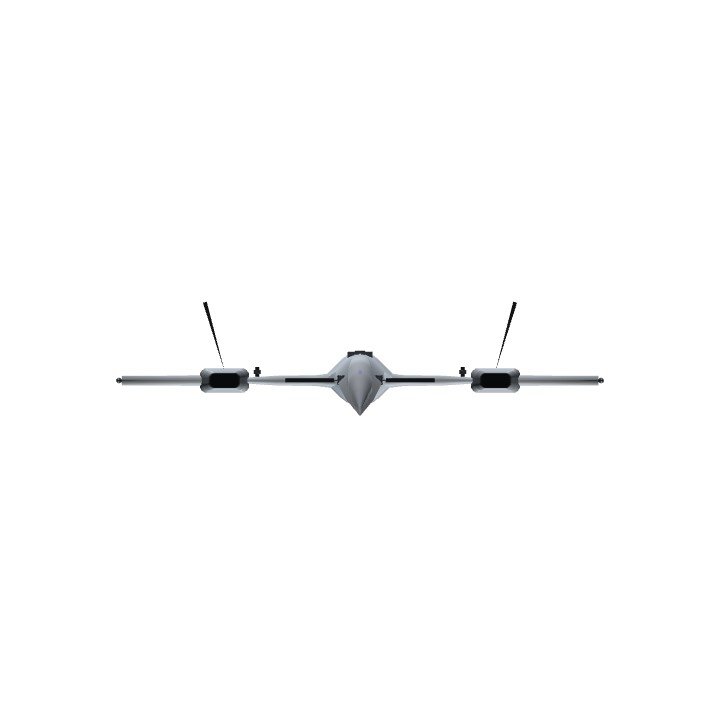
- Wingspan 40.9ft (12.5m)
- Length 60.4ft (18.4m)
- Height 9.4ft (2.9m)
- Empty Weight N/A
- Loaded Weight 8,503lbs (3,856kg)
Performance
- Power/Weight Ratio 2.378
- Wing Loading 14.2lbs/ft2 (69.5kg/m2)
- Wing Area 597.1ft2 (55.5m2)
- Drag Points 70
Parts
- Number of Parts 166
- Control Surfaces 2
- Performance Cost 682

@Grroro
lol
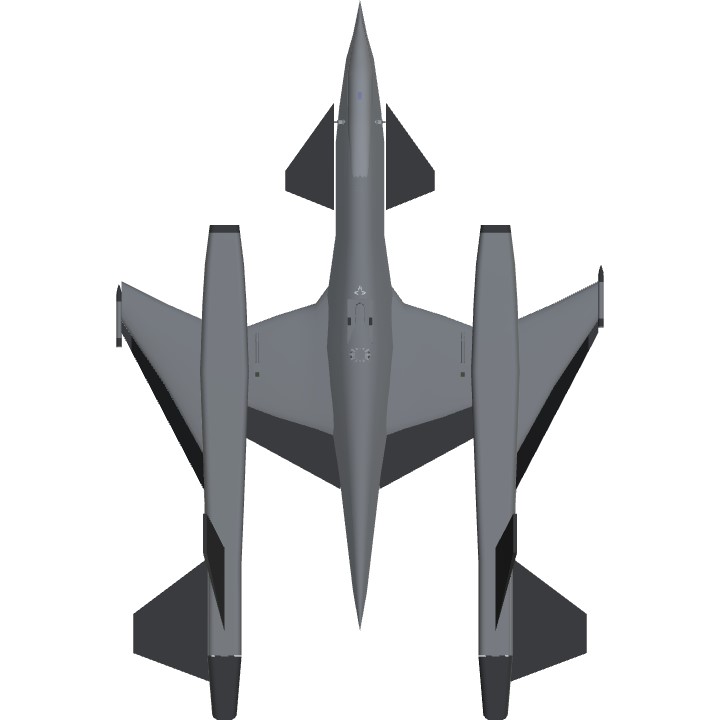
By a quick glance, it looks normal stability to me, conventional wings and tail with added canards.
@GuyFolk yep
And yes, I am overhauling it... for the... idk... 11th time now? but I have a feeling since @ThomasRoderick is helpin me now that this may be the iteration that will work. I HEAVILy doubt it will be a relaxed stability aircraft though.... Here, Have a bit of a peak.
@Grroro
That's ok.
I guess you've learned something and realized that the plane need so much overhaul it's better to build a new one.
@GuyFolk Unfortunately it seems this particular design is out of comission and won't be making the final cut! Don't worry tho .. it seems my S.O Decided she'll take advantage of those tutorials. go check out @ZoaMiki ! she will upload the plane im talking about sometime in may.
@Echostar it quite literally is indeed.
@Grroro
For flat-spin I think thrust vectoring is the best.
It can both recover and induce flat spin lol. (at least for my planes anyway)
So I recommend using thrust vectoring for yaw too except it can't, 2D thrust vectoring for example.
Also, in case of 1 engine failure, thrust vectoring just re-align the thrust and pretty much kill it's own excessive yaw but in non-thrust vectoring there is no way to correct the yaw by itself, only with the help of using the rudder.
@GuyFolk understood, ill keep an activation group reserved for the rudder retraction system, and yes, il probably use differential thrust control as a last ditch acting as a Just-in-case the plane spins out of control. Although unfortunately due to IRL limitations I cannot make said changes right now or even for the following few days, ill make sure to add these systems when I'm free.
@Grroro
Post-stall maneuver is really a last ditch effort because irl fighter usually have high wing loading (400 kg/m2 ++) because it need to carry a lot of equipment weight needed to complete the mission.
So low wing loading means it is harder to stall and don't need to do PSM to have high maneuverability.
Just saying that there is a trade-off, you can have low wing loading but PSM will be hard to achieve.
But there is a work around that make high wing loading have more maneuverability, it's the same technique irl and I used in my build, you turn at high angle of attack. (Pretty advance concept but it is in my tutorial series.)
Be careful, retracting rudder will make the plane spin out of control.
It should toggle by pilot, not by speed below 100 mph because that may be speed when pilot want to land.
No, differential thrust react too slow, use it as last ditch only.
@GuyFolk also, that SHOULD mean that differential thrust for yaw would be better instead of a rotor... correct? (Or that both are similarly applicable for this system)
@GuyFolk thank you for taking the time to write that!
For the wing loading, make the wing loading higher would also affect high speed maneuvers greatly and that is not something I intend, if you have seen my previous builds then you will know the e40's greatest superiority point is high speed maneuvering. The reason why it is even using forward swept wings is because its far more practical for what I aimed for, of course it comes at the cost of instability
So unfortunately trying to increase wing loading would defeat the sol purpose of why its even named "Outrider" or in this case "Echostar" (that name is more of a lore reference).
I've added thrust vectoring via your video only as a last resort in battle, when the enemy aircraft/missile somehow manages to outperform it in normal flight. If that happens, the plane will make distance using afterburners, slow down and get to a stall point and then the tvc does its thing until the missile/aircraft is in line of fire. Its risky
But thats the only thing I could think about..
However, about the yaw behavior, thats some good info! I will make sure to add some sort of system that retracts the rudder when its below 100 mph.
I've got some tips for you.
- The plane rolling out of control is exactly a problem shown in the video, it's not a big problem and can be fixed with a simple +/- in FT.
For yaw, it is natural behavior because you have a fixed rudder in (2 of them actually) which will always try to turn your plane into air stream in weird way.
My plane suffer from this problem too, I combat this by making smaller rudder of fold the rudder to horizontal so it'll not act like rudder anymore.
Another point is your plane have low wing loading(69.5kg/m2) so you won't stall easily and it'll enter post-stall maneuver at very low speed. (You can ignore this tip if you want to do PSM only at very low speed)
Cheers!!
@Grroro np!
@Grroro no problem
@V
@Guianlorenzo
@mrshenanigans
thank you for the kind spotlights!
@Grroro oh cool
@MrShenanigans if asking how I design my cockpits, then I mostly put down my design on paper
How do you make the nose and cockpit?
@Ardvark thank you
Pretty good so far
@ugandaknuckles thank you for updootes