
So for the first time in many months, I finally decided to try and build something again.
It can walk forward and backward... and that's it.
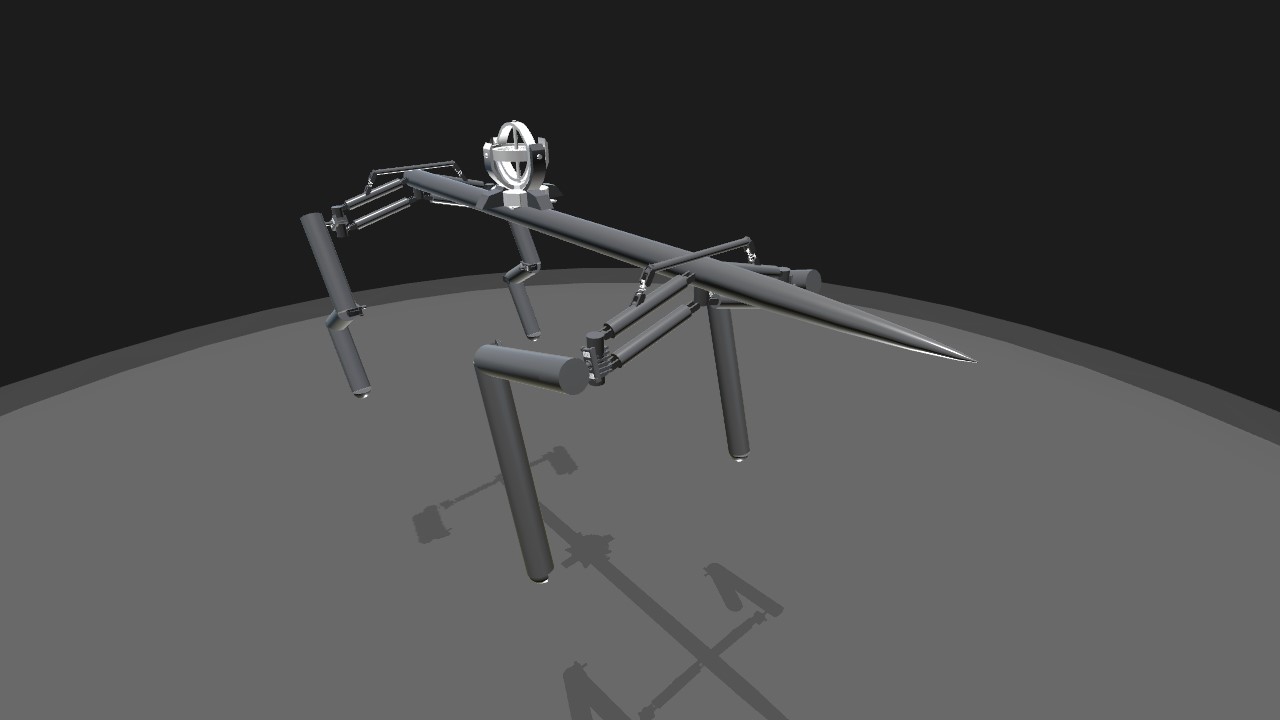
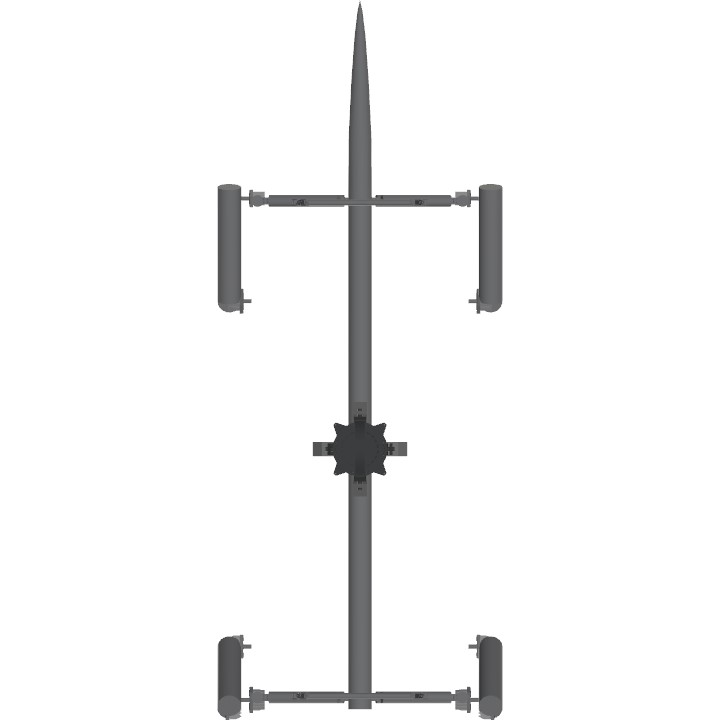
What I have produced this time is a small quadrupedal walker frame.
The best part about this specific build is, however slow, the movement is surprisingly organic, using inspiration from both canine anatomy and some mechanical concepts I have used in the past, like my suspension system and a certain FT code Ive been toying with for a while now.
I mean it's kinda slow in it's gait, but it was more of an experiment to see if I can make more complex animation functions.
I plan on incorporating a sort of "sprinting" feature in the future, hence the current FT functions' names as "PaceSlow".
The point indicates the front of the machine, as there is really nothing mor than the frame to go off of.
I swear if one of you makes LQ-84i before I do, I'm gonna flip a table.
I honestly do not know when I will post my next creation, and it might not be for a long while.
Specifications
Spotlights
- AtlasMilitaryIndustries 3.8 years ago
General Characteristics
- Created On Windows
- Wingspan 4.9ft (1.5m)
- Length 12.5ft (3.8m)
- Height 6.0ft (1.8m)
- Empty Weight 2,518lbs (1,142kg)
- Loaded Weight 2,518lbs (1,142kg)
Performance
- Wing Loading N/A
- Wing Area 0.0ft2 (0.0m2)
- Drag Points 1316
Parts
- Number of Parts 78
- Control Surfaces 0
- Performance Cost 746


Umm upon review I'm not sure if this version has the backwards walking option. It is either controlled by throttle or pitch, not sure.