



AZ-11 Ibarazaki R1
Assault Drone Frame
Weapon Configuration: Conventional Balanced
Hull Configuration: Standard
Rank: V
--- Named after a certain girl who... smells of lemons ---

--- BASIC USER MANUAL ---
"Vanilla" version here
The no-mods version does not include the yaw correction unit, but lets you reach higher speeds of over 400 mph.
Controlled Flying Test - Typhoon Circuit - 5:54 (missed:1)
CONTROLS:
Pitch - Strafe Forward/Backward
Roll - Strafe Sideways
Yaw - Rotate Sideways
Throttle - Lift Engine Control
VTOL - Weapon Elevation
AG1 - Boost Forward Mode
AG8 - Main Power Unit Off
FEATURES:
- Arcade-like flight model with impressive handling
- Yaw angular velocity correction (mod only)
- Computer resources-saving construction
- Weapon elevation correction during pitching (*except anti-infantry gun)
- Gun-induced vibration during firing (totally a feature)
[ ! ] Built for High physics
[ ! ] Uses a flight control core unit based on the one I developed a few weeks ago. There is the addition of a heading correction unit using the Fly-By-Wire mod by MOPCKOEDNISHE, the rest is mostly the same and vanilla. (Computer block is located in the head where the floating attach points are)
( i ) Neutral Throttle ~32%
[ ! ] If the unit pitches downwards after releasing forward pitch, pitch backwards to revert to the neutral pitch (does not always work). This sometimes (rarely) leads to the second event:
[ ! ] If the unit spins uncontrollably and the heading correction unit does not function, pitch forward to stop spinning. To prevent this event, avoid putting diagonal backward stick inputs (pitch back + roll left/right) at speed.
[ ! ] The low mass of the aircraft means that it is susceptible to bullet knockback, and is thus quickly destroyed by enemy guns.
Recommended Levels:
Typhoon Circuit
Rocket Training (with lucky spawns you can even destroy 8-9 tanks)
Convoy Assault
--- End BASIC USER MANUAL ---
--- TUNING MANUAL ---
While the current tuning setup of the AZ-11 is already very good for flight and combat, you may choose to adjust the settings shown.
Gyroscopic Stability: The primary gyroscope stabilization strength of the flight unit core. This is in the only gyroscope in the machine. Increasing this will increase the risk of permanent roll. Suggested speed 0.50 (50%), stability 0.30 (30%).
Correction Sensitivity: The parameter "Sensitivity" under "Angular Velocity" in the only flight computer in the machine. Increasing this increases the risk of the error events previously mentioned occuring, but decreases yaw correction at high speed. Suggested 0.6 to 1.2.
Experiment: Flight Core
Goal: to achieve an arcade mecha-style flight model with an almost massless and dragless body (body movement is cosmetic)
Test Body: AZ-11
Result: Success
Notes: all actual thrust is produced using modded J15s, VTOL engine is cosmetic
--- End TUNING MANUAL ---
The AZ-11 "Ibarazaki" is a second generation Assault Drone Frame developed by ASTIND UDD (Unconventional Dynamics Division), a branch that specializes in experimenting with new control systems. The AZ-11 trials a newly-developed flight control unit that would eventually spawn other developments of Frames.
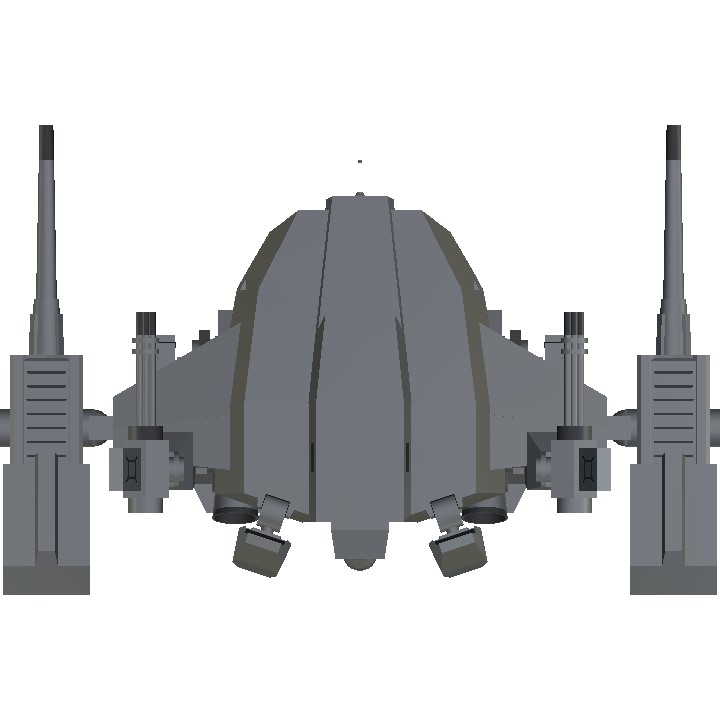
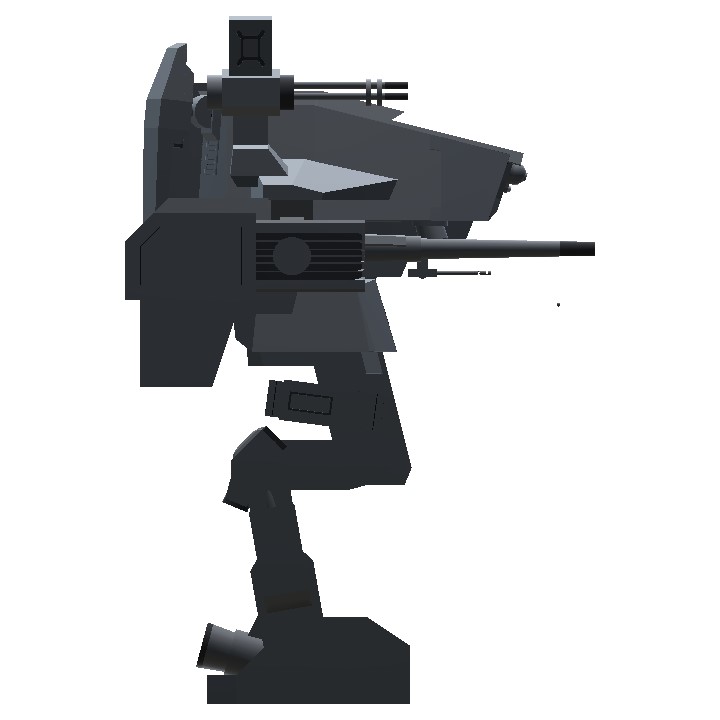
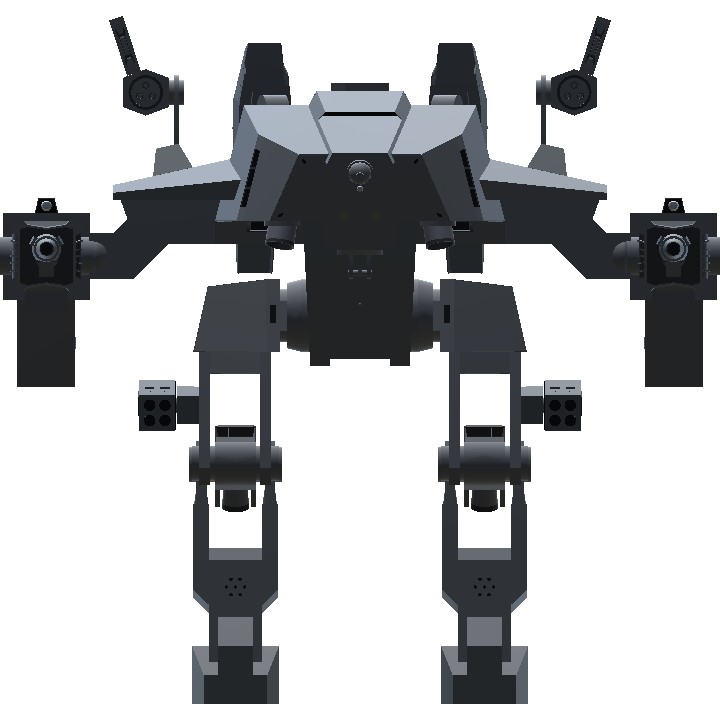
The AZ-11 consists of a rigid upper body with three lift rocket engines and two externally mounted control engines, as well as two heavy-adaptable and two light hardpoints. The design of the armored camera used by the superheavy tank Keeper has been adapted to fit on the Frame. The rear "twin-tails" is an identifiable feature and provides much of the manouverability.
The unit has legs which are mainly used for vectoring its own set of two control engines each, and additionally allow walking around the base it is stationed in. The lower engines provide supporting thrust mainly seen in catapult use.
Specifications (AZ-11)
Note: Hull refers to the unit without weapons or the rear control engines, technically extensions of the body.
Config LWH: 4.05 x 6.20 x 5.93 m
Config Mass: 6,200 kg (13,700 lbs)
Config Max. Speed: 530 km/h (330 mph)
Hull LWH: 3.26 x 4.67 x 5.42 m
Hull Mass: 4,500 kg (9,920 lbs)
Hull Capacity: 10,000 kg (22,000 lbs)
Crew: None
External Operators: 0-2
The official designated string-name "Ibarazaki" comes from a character of the start of the 21st Century. However, the name is often shortened to "Ibara" in normal and sometimes semi-official use, additionally making more sense in context.
Introduced for "the possibility that advanced Assault Frames may have fallen into separatist hands", the AZ-11 is primarily designed to directly engage other Assault Frames. The relatively high speed and stability of the flight system allow for the AZ-11 to do this very well. However, after its inception, the machine was used more often against ground targets, with the prey-by-design (except for more agile Frames) transferred to fighters.
The AZ-11 is fully autonomous in its flight and combat, but allows individual systems to be taken over by external operators. It cannot enter missions without human approval but missions can be set to allow the unit to attack freely.
An unknown number of AZ-11 units have been built, but there are two show units and two shell units. AZ-11 units are for ASTIND. self-use only, with the exception of specific variants as listed below.
ARMAMENT
AZ-11, Configuration: Conventional Balanced
[Primary Armament] 2x 105mm/L20 FmK II cannon-launcher. Effective range 2.4 km.
[Primary Armament] 2x 40mm autocannon. Effective range 2.4 km.
[Range Armament] 2x multipurpose guided missiles. Range 4.8 km.
[Support Armament] 1x 20mm anti-infantry autocannon. Effective range 1.0 km.
[Defensive Equipment] 2x countermeasures launcher. 16x flares.
VARIANTS
AZ-11: Normal hull of the Frame project.
-A: Unit with added armor, increasing the hull mass by about 1,000 kg.
-T: Experimental hull with an additional free-traversing hardpoint (but with limited elevation without an adapter) off the rear lift engine housing. Scrapped due to flight instability.
-TC: Experimental "rock-catching" unit with a double-hinged claw/arm from the rear lift engine housing, and additional free-rotating lift engines on the side hardpoints.
Building your own Flight Control Unit (finish reading once, then build while reading step by step)
1. On the entire body, set massScale to 0 and calculateDrag to false. (You should keep small amounts of mass in parts that require them, like missiles and springs, and the cockpit block. Note how this affects the CoM.)
2. Place a single straight block at the CoM, then nudge it out of the body. (Tip: Use large nudge values like 1.0)
3. [body roll, completely optional] Attach rotators in a line to the block for cosmetic body rotation. The AZ-11 uses a single small rotator for pitch and hinge rotator for roll. Set their massScale to 0 or as low as possible.
4. Attach a block to the end of the rotators. This is the core of the FCU. Add a fuselage intake onto the front of this block. This is because air availability is calculated for separate bodies, not the entire aircraft.
5. Add a gyroscope and individual engines (recommended J15s) to this block. Engines should have an input max of a very small number like 0.01 to ensure throttle responsiveness. Increase powerMultiplier accordingly. You will want engines to apply sideways and forward/backward vectors, as well as a lift engine.
6. At the same time, apply massScale to keep the mass of the FCU to a desirable low value, but enough so that rotating the body does not affect flight.
7. Move all the parts of the FCU to the CoM. It is important that the engines are along the axes of the CoM. (Tip: Use the gyroscope's mesh to check) You can do this by first putting the coordinates of the first straight block into all the FCU's component's coordinates, then nudging the block with the same large nudge values as earlier.
8. Test your aircraft to check for unwanted rotation when inputs are applied. Tune the gyroscope to the aircraft's mass, and adjust engine power for realism or reliability.
Notes:
- Use WNP78's massEdit.py or a text editor with regex functionality (tutorial) to remove the body's drag and mass.
- Missiles and rocket pods with zero mass don't work, and cockpits with zero mass can easily crash/freeze your game if you explode. Rockets, however, still work fine.
Specifications
General Characteristics
- Successors 1 airplane(s)
- Created On Android
- Wingspan 20.3ft (6.2m)
- Length 13.3ft (4.0m)
- Height 19.4ft (5.9m)
- Empty Weight N/A
- Loaded Weight 315lbs (142kg)
Performance
- Power/Weight Ratio 128.374
- Wing Loading 936.8lbs/ft2 (4,573.8kg/m2)
- Wing Area 0.3ft2 (0.0m2)
- Drag Points 523
Parts
- Number of Parts 506
- Control Surfaces 0
- Performance Cost 1,825
Required Mods
-
Fly-by-wire
by MOPCKOE_DNISHE
Version 1.0 (3/22/2019 10:33:36 PM)
Just lovely to fly around.
Amazingly awesome!
Looks like something from gungriffon
@ThomasRoderick oh hecc i am exposed (interesting to know that someone likes to dig my descs for info)
The name references more of the rear engines (stated in the main visual).
This machine uses a double joint design instead of reverse joints
Is the name a reference to the reverse joint? And also, is the nickname referring to the fact that the character this mecha was named after lost both of her lower legs in a tragic car accident?
@SuperSabre1945 I have removed your comment. Please be sure to read the rules