
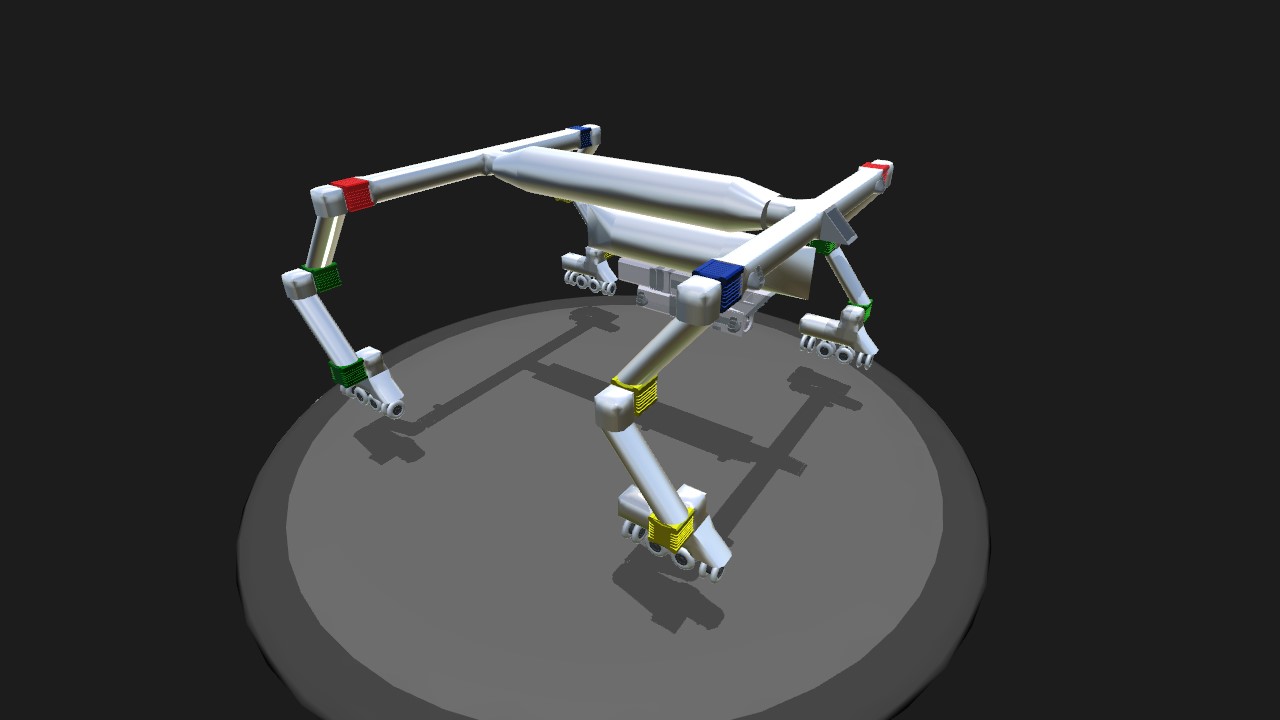
The problem with walkers in SimplePlanes, and any game with fixed controls, is how do you make them move in the right fashion without any code, and using parts that have limited function? Here, the hips are set to analog vertical and the knees are analog horizontal. As you rotate the stick, the leg contracts, knee contracts, leg extends, knee extends, causing the walking motion. I've done this in Trials, but here there is nothing to really hold it upright, like the balloons in Banjo: Nuts & Bolts.
At any rate, here is how to control the silly thing. You will need easy access to Roll, Yaw, Pitch and VTOL; I recommend dual-joysticks. Begin by holding the analogs in opposite directions, then simultaneously rotate them at a steady pace clockwise for forwards, and counter for reverse.
Throttle: Activates Thrusters holding it all down.
Activate #1 to enable very slow turning with both sticks.
Blue joints (Hips): Pitch
Red joints (Hips): VTOL
Green joints (Knees): Roll
Yellow joints (Knees): Yaw
BONUS:
There is a 1 in 4 chance something fun will happen:
> Most often works best going forwards
> Somewhat often best going backwards
> Periodically will dance a jig in place
> Occasionally the feet will explode in a blaze of confetti.
Specifications
General Characteristics
- Created On Windows
- Wingspan 31.2ft (9.5m)
- Length 32.8ft (10.0m)
- Height 17.5ft (5.3m)
- Empty Weight 10,064lbs (4,564kg)
- Loaded Weight 19,144lbs (8,683kg)
Performance
- Power/Weight Ratio 1.408
- Wing Loading N/A
- Wing Area 0.0ft2 (0.0m2)
- Drag Points 19673
Parts
- Number of Parts 111
- Control Surfaces 0
- Performance Cost 685


@JolanXBL Nice work! glad to see some others trying real walkers. . Hard to control though. I tried this way your trying early on, unfortunately i couldn't get the holy grail of this line of thought, turning using double sticks, to work. So I kept it simple, for mass appeal. I used motor speed to control the order of the joints movement instead of manual.
also when I tried a Quadruped, I found it useful to have a powered pendulum on it to let you shift the weight
This Is exactly what I had hoped for. I'm an industrial designer, or maybe a concept artist. but i'm no engineer. My goal was to prove Walking could be done in a flashy package to get others interested
@JolanXBL quite intriguing!
@Scifieart @laSoul @MrMecha