

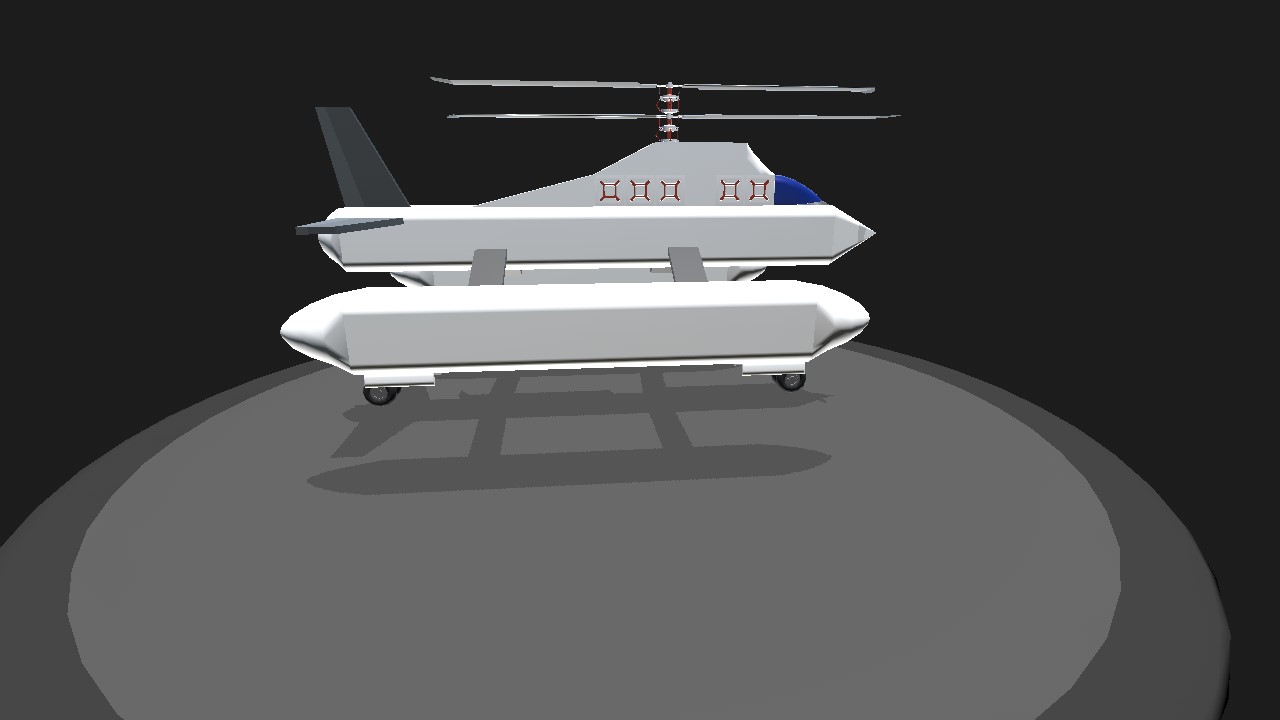

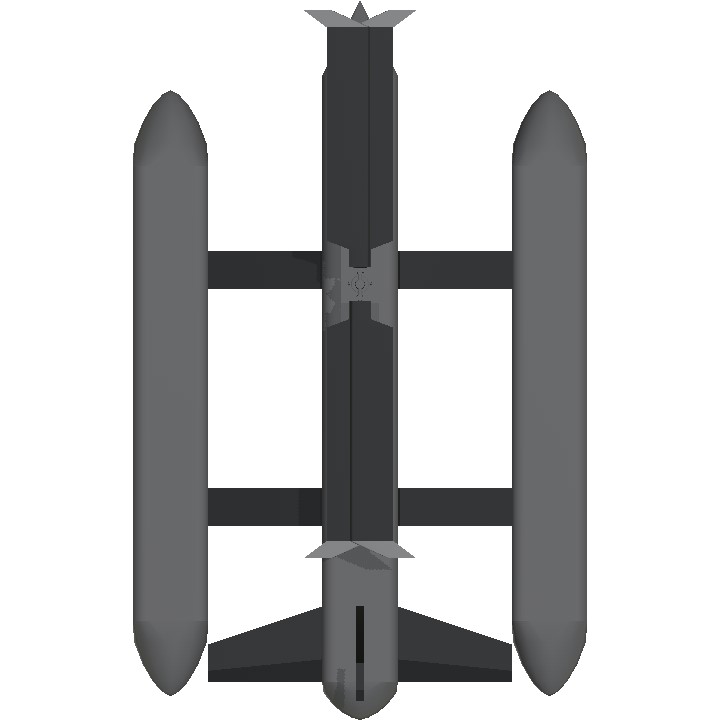
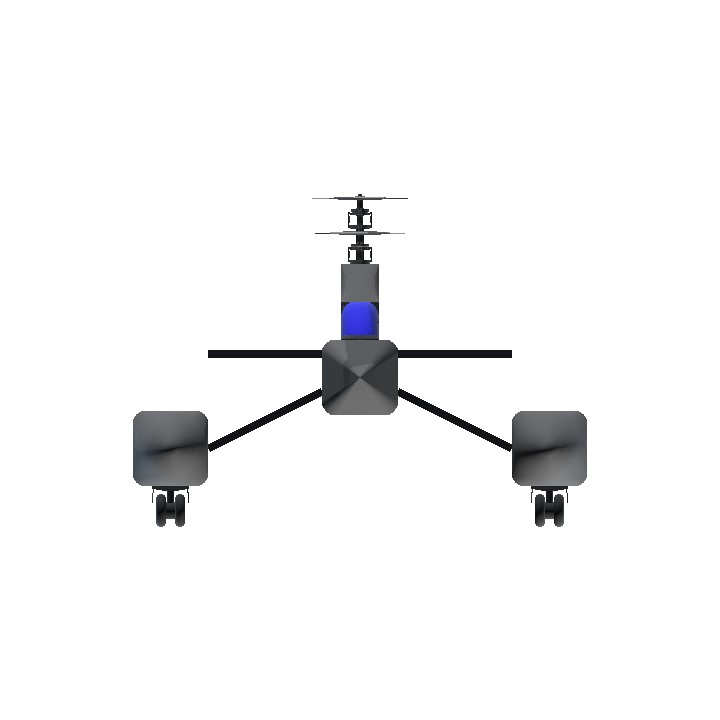
A coaxial rotor helicopter, designed for a multitude of different roles, including but not limited to:
Firefighting
Attack Helicopter/Helicopter Gunship
SAR (Search And Rescue)
Police
Specifications
General Characteristics
- Created On Android
- Wingspan 19.7ft (6.0m)
- Length 31.2ft (9.5m)
- Height 14.5ft (4.4m)
- Empty Weight N/A
- Loaded Weight 16,212lbs (7,353kg)
Performance
- Power/Weight Ratio 4.158
- Wing Loading 223.8lbs/ft2 (1,092.8kg/m2)
- Wing Area 72.4ft2 (6.7m2)
- Drag Points 4512
Parts
- Number of Parts 53
- Control Surfaces 3
- Performance Cost 399

Variants to be posted soon:
Attack Helicopter
Rescue Helicopter
@Zilozite lol
nice F-35 you got there
@Trainz448 Udate: after I deleted the gyroscope, I found that the signs on the throttle input need to be reversed in order for the heli to turn in the right direction. Also I found that the hack only works at a throttle smaller than 30%. After that, the RPM governor takes over and rotor speed is the same in both regardless of your input.
However you can trick the throttle governor into going faster or slower by instead of the engine speed, apply the yaw to the collective Pitch input of the rotors.
So top rotor: input collective (2nd tab on XML overload editor) =VTOL-0.3Yaw, bottom rotor: input = VTOL+0.3Yaw
@Sockdragger thanks for the tip!
Anyway, it's after 10 pm here in Memphis TN. I'll be back tomorrow
Love this one. Nice illustration of what one can do with just the basics and also a nice practical example of a working helicopter.
Ps, if you want to be able to turn your helicopter in hover Mode, click the top rotor and in XML replace the power input 'throttle' with 'Throttle +0.1'Yaw'. For the bottom rotor replace Throttle with 'Throttle -0.1 Yaw'
@DreamerIndusturies thanks
Nice helicopter!
I like it. It's very stable.