
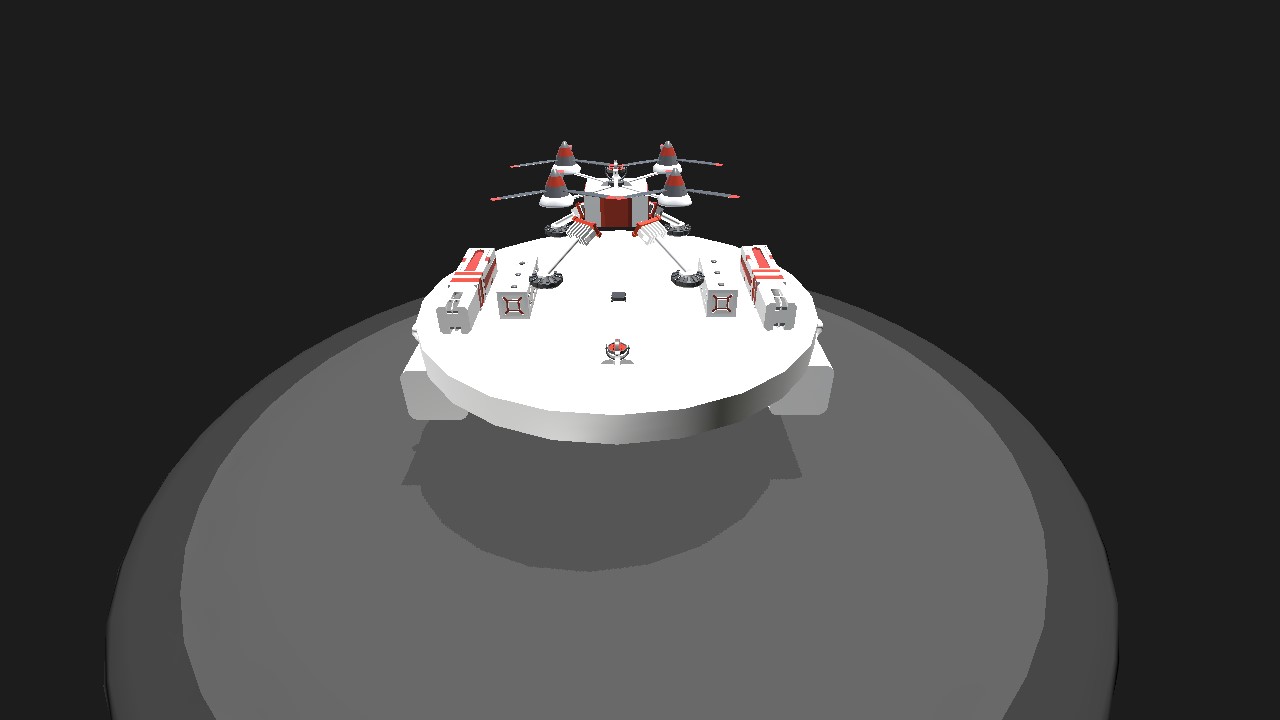
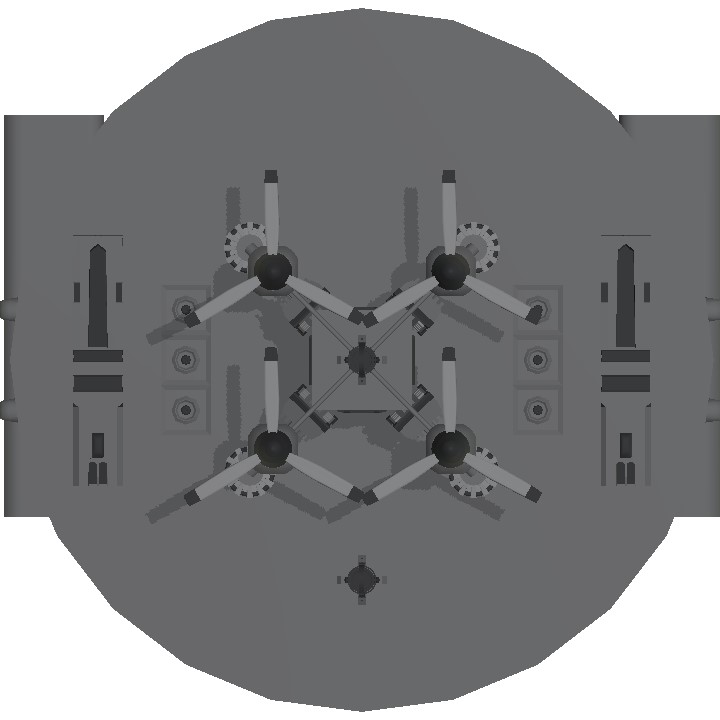
This build was intended purely to prove a concept for hive mechanics, where a drone could travel anywhere undetected, complete a mission, and automatically land on a mobile command base for a secondary mission. While this build does do that, I don't know what to incorporate this into, so I will leave it to you to decide how you'd like go use it. Controls are fairly simple:
AG1 + AG8: Returns drone back to home base
Deactivating AG1 and AG8 turns off the magnet on the drone, allowing it to fly off.
AG3: Toggles Engine on Main Base
AG7: Sets Main Base to Hover.
Landing Gear: Toggles landing gear on drone
Specifications
General Characteristics
- Created On Android
- Wingspan 23.5ft (7.2m)
- Length 23.0ft (7.0m)
- Height 12.9ft (3.9m)
- Empty Weight 7,419lbs (3,365kg)
- Loaded Weight 13,985lbs (6,343kg)
Performance
- Power/Weight Ratio 1.928
- Wing Loading N/A
- Wing Area 0.0ft2 (0.0m2)
- Drag Points 7639
Parts
- Number of Parts 17
- Control Surfaces 0
- Performance Cost 303
In other news, exams happening soon so I should really not be doing this, and I'm kinda out of ideas for what to do, so till I see something interesting I'll leave it at that for now!