

A simple testing rig to explore and demonstrate rise/descent indicators and rise/descent limiters....
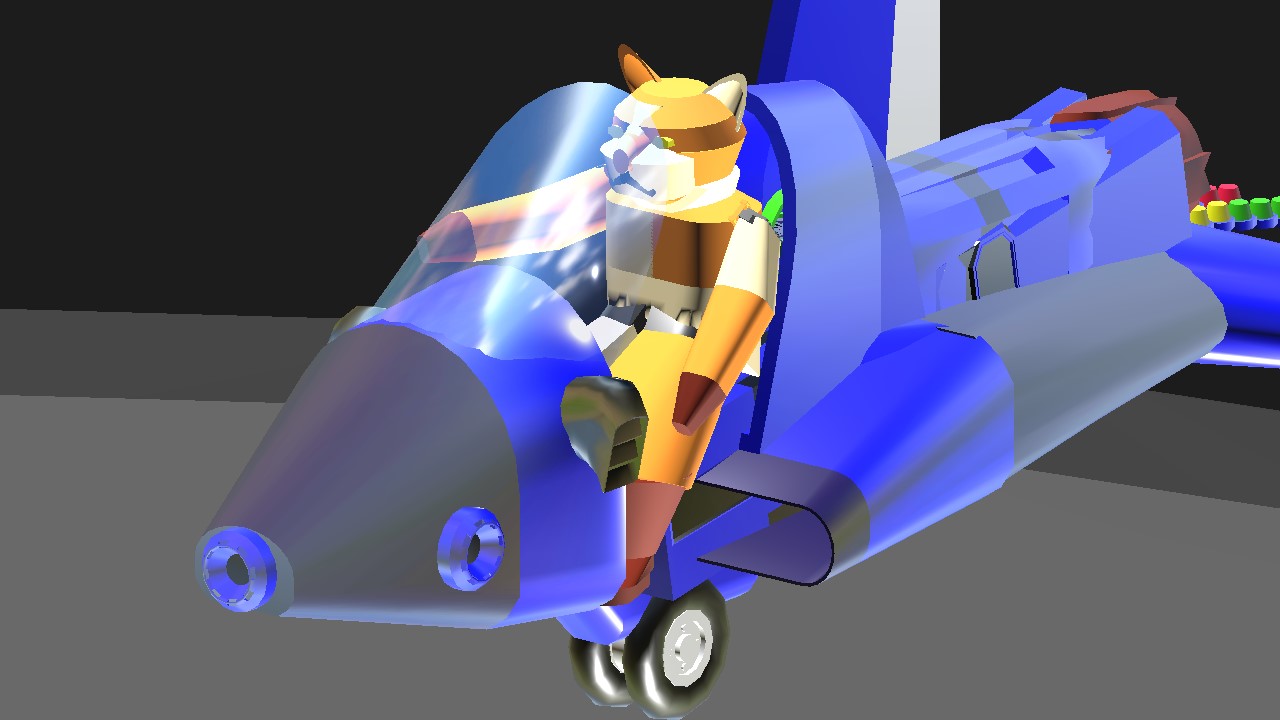
aah, yes. It has Mr. Coats as test pilot
In short:
One of the problems with flying VTOL planes, helicopters or even sailplanes in SimplePlanes is that you have only limited means of knowing how fast your plane is rising or sinking or even if it is rising or sinking at all. However, we can build our own vertical/descent indicator by using FunkyTrees code to trigger a light to go off if the FunkyTree function for altitude change exceeds a certain positive or negative value.
For VTOL plane landings, we can then use the same code to ‘brake’ when the plane sinks so fast it would get destroyed on landing
The plane:
The plane posted here is basically just a gyroscope-stabilized platform that uses a VTOL engine to rise and a mini-jet to move forwards. Most of the steering is done by VTOL Reaction Control Nozzles (RCN’s).
Throttle controls the power to the lift engine (and thus determines if the plane rises or sinks). Pitch fires up the jet for forwards movement or the front nozzles for braking/flying backwards. Roll (not Yaw) turns the plane
Some FunkyTree Theory:
- The ‘rate(x)’ function measures the change in the value of the factor x over a given time. Thus rate(Altitude) gives you a measurement of the change in altitude.
- There is some science behind what exactly the return value for rate(Altitude) means in feet or meters per second. However this is not as important as simply knowing IF your plane is rising or sinking and if it is rising slower or faster than before. So we don't have to bother with absolute values all we need to know is that:
- the number is positive when your plane is rising,
- negative when it is sinking
- and that the larger your number, the faster your plane is rising or sinking.
- The Beacon Light and Position Light building elements have a field in their properties called Input. If you put a Boolean statement in this field (like 'Trim>0') the light will switch on when the statement is True and off when it is false.
- Thus, if we write rate(Altitude)>x in the input field, the light will switch on if the plane rises faster than the value x. If we write rate(Altitude)<-x the light will switch on if the plane sinks faster than the value -x
Building a descent indicator:
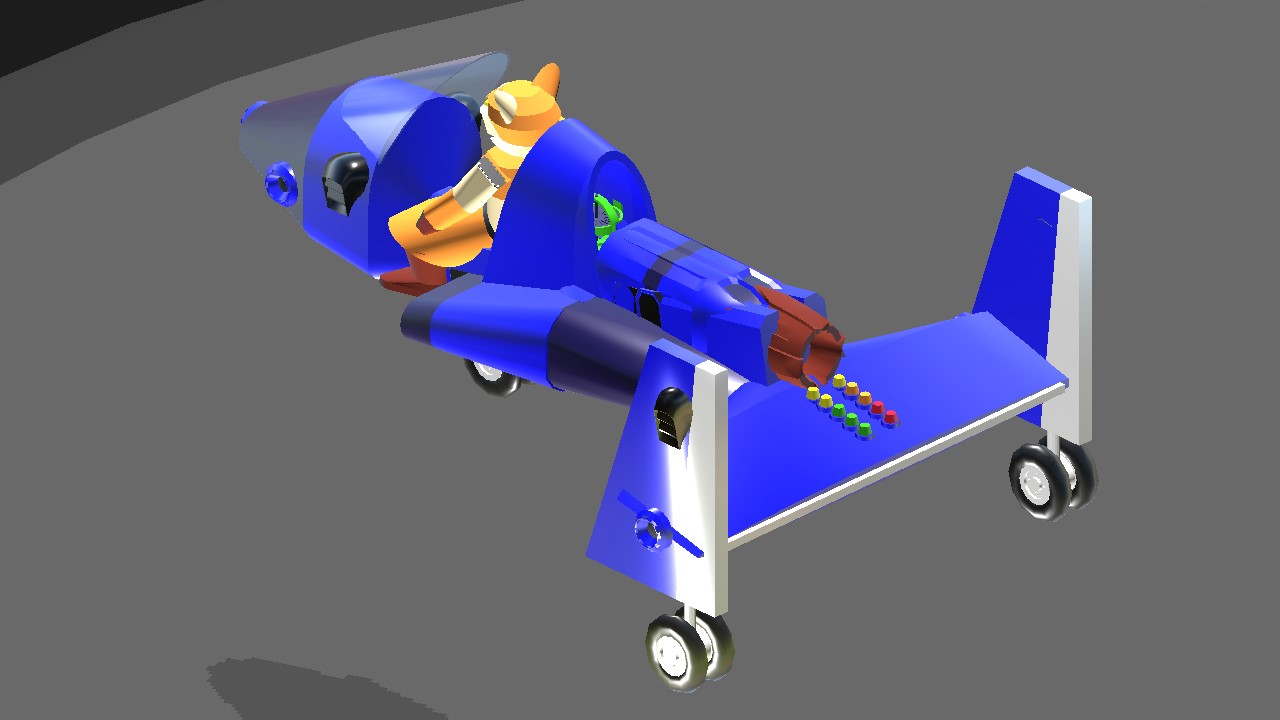
In this example we add two rows of five beacon lights each to the back of the test rig where they are easily visible in Chase view.
- The left row is green. In the overload editor, we select the input field and type the statement rate(Altitude) >1,5,10,15 and 20, meaning that the first light will burn when the rig starts to rise. The faster it rises, the more lights will burn.
- Likewise the right row is yellow, orange and red and the input statements for the lights are rate(Altitude)<-1,-5,-10,-15 and -20 respectingly. Again, the first light will start to burn as soon as the plane is sinking and again, the faster the rig sinks, the more lights will burn.
- With rate(Altitude) between -1 and +1 -so somewhere between barely sinking and barely rising, no lights will burn..
Testing:
Taking the plane for a spin, I found that:
- With the lights installed it is pretty easy to gage whether you are sinking or rising
- Using the lights to try to find an engine setting where the rig neither rises nor sinks, I found the rig is 'hanging still' at 65-70% power.
- Dropping down from ever increasing heights, I found that the rig can easily withstand rough landings with the rate(Altitude)<-10 light on but crashes with the rate(Altitude)<-15 light on.
Building a descent limiter
Now we will keep the rig from sinking so fast it crashes. To do so, we add an extra safeguard element to the Input of the lift engines that increases the power in relation to the sinking speed. We will tune it so that when the sinking speed reaches the critical value, the extra power keeps the rig from sinking.
In the overload editor, we open the Inputcenter tab for the VTOL engine and in the input field, we replace the value Throttle with
Throttle - 0.04*rate(Altitude)
- We subtract the rate because we want the throttle to increase when the rate of change in altitude is negative
- The value 0.04 is chosen because the rig is safe with rate less than 15 and the rig will not sink at 60% power. So that with rate 0.04, the added value of 0.04* rate(Altitude) = 60 when rate(Altitude) is -15
One last refinement:
in the current form, the throttle not only gets adjusted when the rig is sinking, but also when it is rising. We want it only to kick in when the rig sinks. So we change the input function once again. This time to:
Throttle - 0.04*clamp(Rate(altitude),-15,0)
And now it's up to you:
Congratulations. If you haven't stopped reading and reached this point, you know my tricks for building a custom descent indicator and a custom descent limiter. So download the test rig and take her for a spin to test all the theories explained here. May be alter a couple of variables to see what changed. Then use what you learned in your own builds. Mr Coats encourages you to
A video explaining all of this is currently being made and will be posted shortly.
Happy flying
Ps, Mr Coats, the pilot is available Here. Please post if you use him in one of your planes. If you do it in the next 5 days, you can even participate in mr Coats' Birthday Challenge
Disclaimer
No cats were harmed during the making and testing of this build
Specifications
Spotlights
- WinsWings 5 months ago
- oldmate52 5 months ago
- Supersoli8 5 months ago
General Characteristics
- Created On Android
- Wingspan 11.5ft (3.5m)
- Length 17.0ft (5.2m)
- Height 7.6ft (2.3m)
- Empty Weight 4,863lbs (2,205kg)
- Loaded Weight 5,298lbs (2,403kg)
Performance
- Power/Weight Ratio 2.163
- Wing Loading 48.6lbs/ft2 (237.4kg/m2)
- Wing Area 109.0ft2 (10.1m2)
- Drag Points 2272
Parts
- Number of Parts 84
- Control Surfaces 3
- Performance Cost 390

@Sockdragger Oh great, Now I find it, download it as a PDF and will read. Thanks
@WinsWings
https://docs.google.com/document/d/1NmEgmyQN0wJi1kh8AinAXG5FaNO9YBguuWmJPsl-dnc
Here you go...
Nice, @Sockdragger by the way, I was so busy a few days back, I can't find the GoogleDoc that you shared to me, I want to read it nicely- sorry about that
Ima still keep it
Ps @Supersoli8, @TOMAIR0808, you upvoted before I wrote the explanation behind the craft. Please read WHY I made this and decide if you still want to keep your upvote. I won't blame you if you remove it.
@Supersoli8 no, it just uses the Mr.Coats figure and therefore it's flight computer became the standard cockpit
This isn’t a successor