
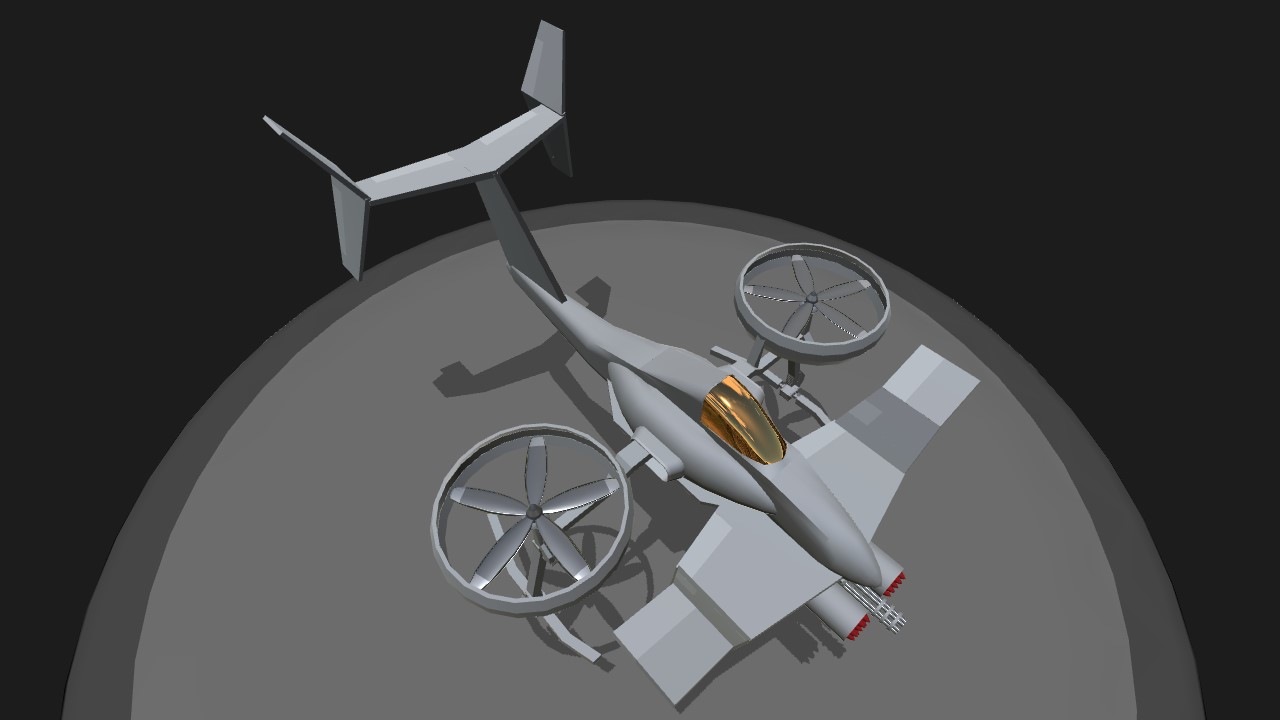

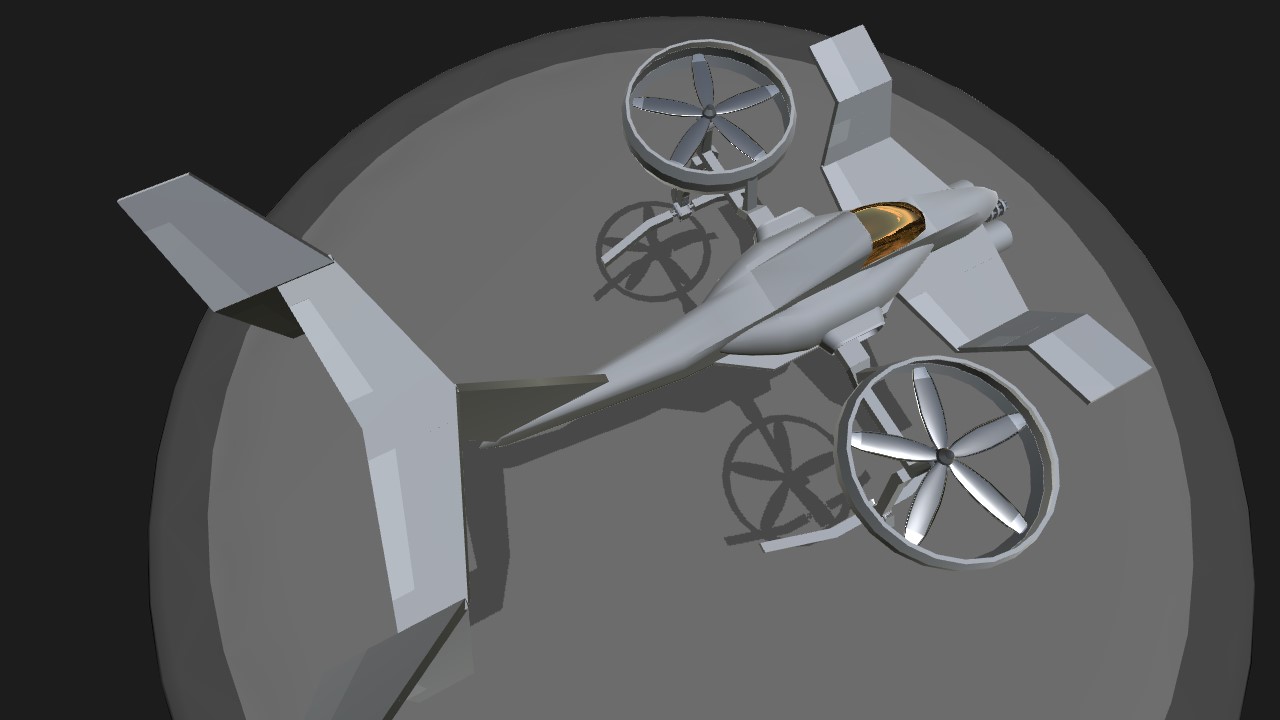
A VTOL with PID(PD to be exact) stability assist and no gyro.
Pitch, Yaw and Roll is completely controllable at very low speeds thanks to engine position, rotation and thrust manipulation. Stability and very low speed control will disable itself when Speed < 3.6kph or Engine is rotated by over 45 degrees. Landing gear is kinda flimsy, so be careful while landing.
Really happy that this worked out in the end. I've never made any PID crafts before. This has definitely been an learning experience. And a final note: I hate gyros. Glad I could do without it for this one.
Controls:
VTOL: Rotate Engine
Activate8: Disable Pitch Stablity Assist. Use after landed on a moving platform. (I.E. Carrier) Re-enable immediately after take off.
Note VTOL related features(Stability Assist, Very Low Speed Control) will disable itself when the engine is rotated over 50 percent. DO NOT set VTOL to over 50% in either direction unless you have enough speed(~160kph). Stability Assist is essential for a controllable aircraft in low speeds.
Revision 1:
Increased Stability Assist cut off point to 50% from 33%.
Fixed landing gear height.
Pitch Stability control can now be disabled with Activate8. Which would cause the plane to wobble if it is landed on a moving object.
Specifications
Spotlights
- Mage2IsTriggered 4.8 years ago
General Characteristics
- Created On Windows
- Wingspan 21.2ft (6.5m)
- Length 26.9ft (8.2m)
- Height 14.1ft (4.3m)
- Empty Weight 3,185lbs (1,444kg)
- Loaded Weight 3,496lbs (1,586kg)
Performance
- Horse Power/Weight Ratio 1.143
- Wing Loading 21.1lbs/ft2 (103.0kg/m2)
- Wing Area 165.8ft2 (15.4m2)
- Drag Points 2890
Parts
- Number of Parts 97
- Control Surfaces 12
- Performance Cost 561



@Mage2IsTriggered Thanks!
Ok, now this is really fun to fly around. Really nice work!