

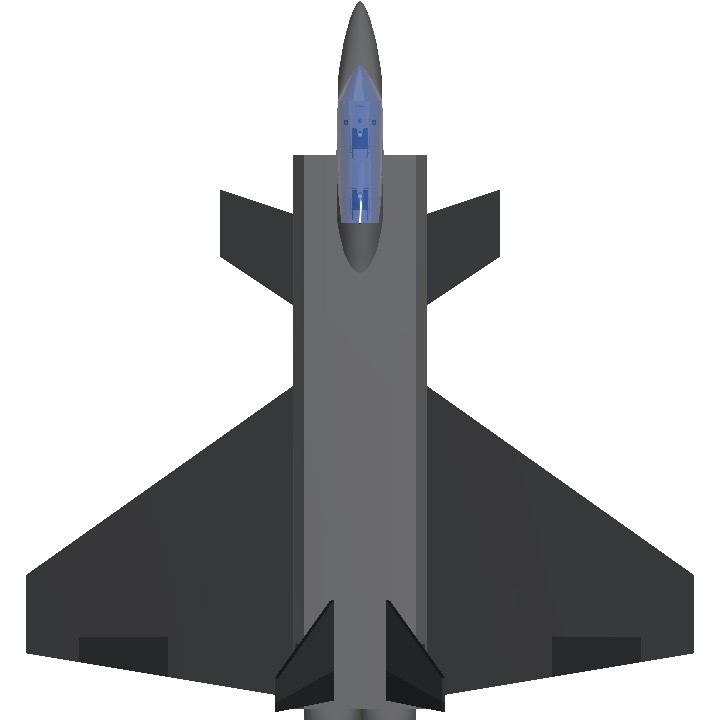
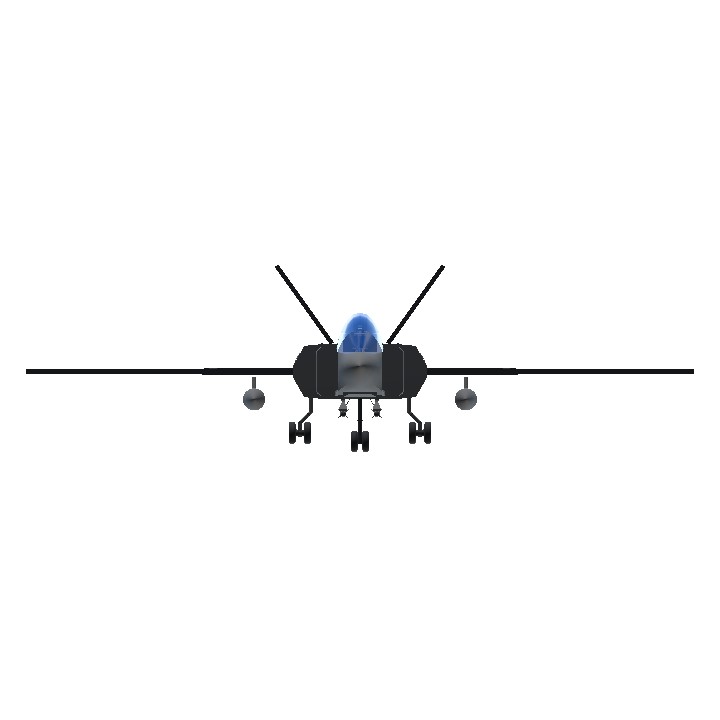
Next generation stealth fighter with thrust vectoring, fairly realistic flight model, and detailed cockpit!
Features:
Detailed, 2-crew cockpit with radar indicator
Internal weapons system, as well as outer hardpoints
Realistic flight performance from low to high speed
Thrust vectoring
Sophisticated G-limiter and aoa limiter (can be turned off)
Extensive air-air and air-ground missiles
Stealth mode, where the plane cannot be targeted at all
and many more!
Controls:
AG1: Manoeuvre mode
AG2: Jettison all weapons
AG3: Open Cockpit
AG4: Jettison external hardpoints for stealth mode(irreversible)
Hope you enjoy the build!
Specifications
General Characteristics
- Created On Android
- Wingspan 49.0ft (14.9m)
- Length 53.0ft (16.2m)
- Height 13.6ft (4.2m)
- Empty Weight 34,830lbs (15,798kg)
- Loaded Weight 42,139lbs (19,114kg)
Performance
- Power/Weight Ratio 1.599
- Wing Loading 58.1lbs/ft2 (283.6kg/m2)
- Wing Area 725.4ft2 (67.4m2)
- Drag Points 1671
Parts
- Number of Parts 385
- Control Surfaces 4
- Performance Cost 1,892

This plane is tested on my phone at high physics settings with minimal issues.
This aircraft may not fly the same way as it did on my phone, so I'll break down the build in detail here:
The plane has 2 different control models depending on its speed. At low speed it aims to maximise aoa, and at high speed it is limited by G-Force. The transition is quite noticeable and not the smoothest, anyone who wants to tune it can feel free to do so. After pitch control stops the PID will run for a short while more before returning the controls to neutral. That really can't be avoided and it's frustrating but that's how you squeeze every drop of performance out of the plane.
Theres a known issue where the plane enters a hard stall if you roll at high aoas, so the roll rate at high aoa has been purposely nerfed to prevent that situation. Finally, the plane sometimes will randomly choose to start wobbling at high speeds, once again this is due to the PID not being perfect, and this is really device dependent so I cant guarantee the code is absolutely bug free.
In any case that's all the quirks of this plane, if you liked it do give it an upvote!