No Tags
Auto Credit Based on Agene's piston uni jointmk2
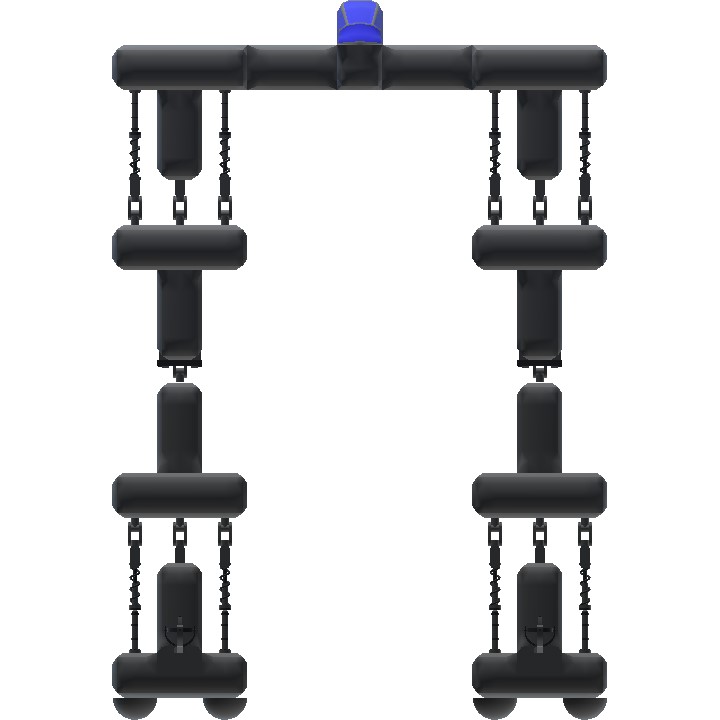
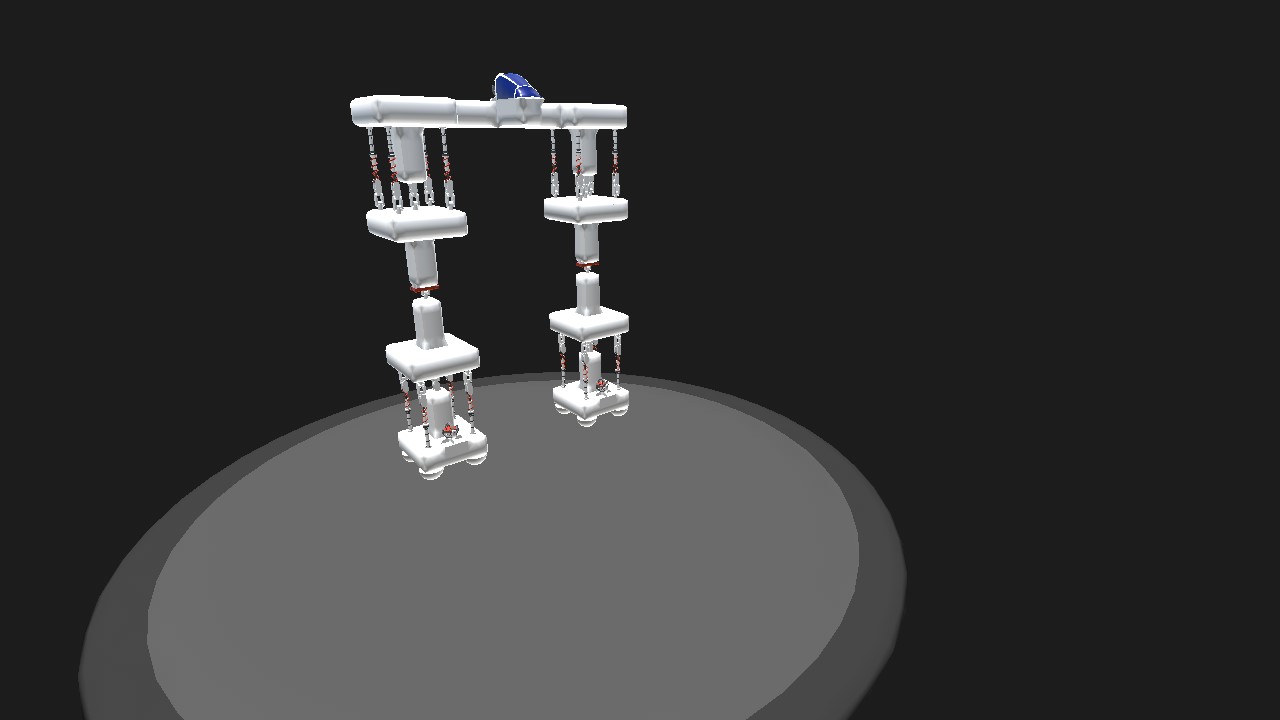
this uses my uni piston rotator system to make a semi functional bipedal walker to turn turn the right thumbstick or pitch and roll clockwise or counter clockwise to vo forwar cycle the pitch up and down to go forward it will turn passively so by using roll you can counter the turning while walking it takes some practice though
Specifications
General Characteristics
- Predecessor piston uni jointmk2
- Created On Android
- Wingspan 18.0ft (5.5m)
- Length 6.6ft (2.0m)
- Height 26.2ft (8.0m)
- Empty Weight 6,666lbs (3,024kg)
- Loaded Weight 6,666lbs (3,024kg)
Performance
- Wing Loading N/A
- Wing Area 0.0ft2 (0.0m2)
- Drag Points 12874
Parts
- Number of Parts 181
- Control Surfaces 0
- Performance Cost 1,337