

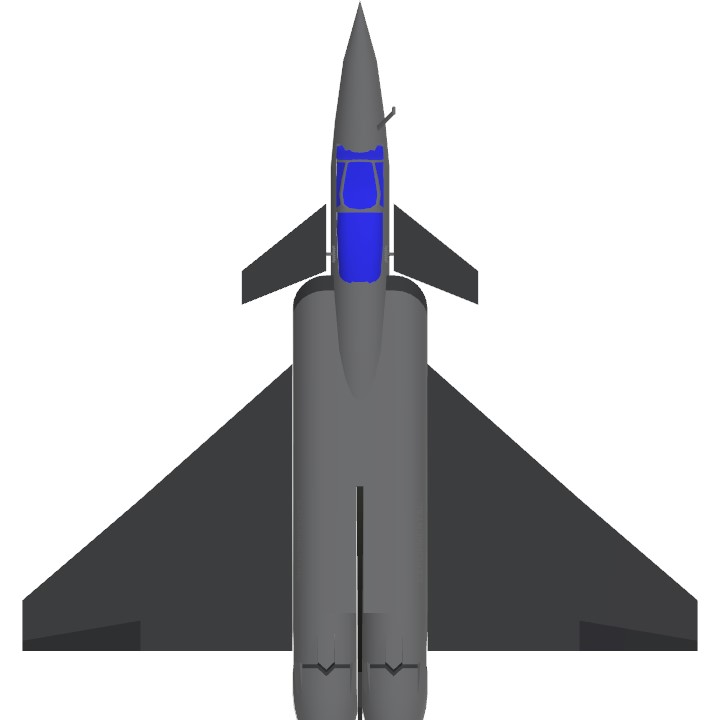
Here is a quick build I've made. On this aircraft, the CoM is behind the CoL, which makes it highly unstable. A PID system is incorporated in the canards to stabilize the pitch axis (it is the only control surface for this axis) of the aircraft. Roll is controlled by normal ailerons.
So you can use this build to try to tune a PID by yourself, for example.
I haven't made a G-Limiter but it could be added.
The canards are controlled directly by the CNRD custom variable.
The Low custom variable is the Auto Trim for low speed and normal Trim.
Here is some useful documentation that could help:
Funky Trees Guide by Snowflake0s
PID Jumpstart Guide by Snowflake0s
Specifications
Spotlights
- NINJ4 6 months ago
General Characteristics
- Created On Windows
- Wingspan 32.5ft (9.9m)
- Length 35.0ft (10.7m)
- Height 13.5ft (4.1m)
- Empty Weight 12,690lbs (5,756kg)
- Loaded Weight 18,350lbs (8,323kg)
Performance
- Power/Weight Ratio 4.041
- Wing Loading 66.9lbs/ft2 (326.4kg/m2)
- Wing Area 274.5ft2 (25.5m2)
- Drag Points 928
Parts
- Number of Parts 30
- Control Surfaces 3
- Performance Cost 322

This is very innovative I’ve never seen anything like this in a military aircraft the PID system sounds one of a kind