
Hello Guys Cocoybuilder here's
I want you to do this XML code some help me for my Project Soon So wait everyone I working on it

I hope you guys help to Some tips on XML coding, and I study it how they works in other rotation
I want you to do this XML code some help me for my Project Soon So wait everyone I working on it
I hope you guys help to Some tips on XML coding, and I study it how they works in other rotation
@Postcommenter6969 thanks dude maybe soon if I solve the problem it sometimes I'm busy for homework I'm a college now dude and sometimes I don't have time for my project I hope I fix this problem because I want my project to look like a realistic
@Cocoybuilder456 i did hehe
@Postcommenter6969 I think you use ai dude
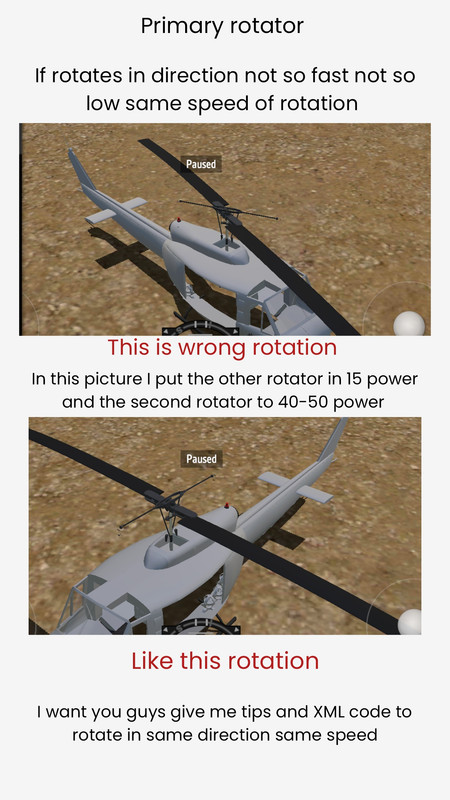
@Cocoybuilder456 ✅ Correct way to make dual rotors spin the same
Instead of using jets to spin the rotors, he should:
Remove the Blasto J50 engines from the rotator shafts
Use one main Blasto jet (hidden inside fuselage if needed)
Drive both rotators through rotators + VTOL input
Match XML on both rotators
✅ XML for perfectly synced rotor spin
Give this to both rotators:
<Rotator>
<Speed>200</Speed>
<Input>VTOL</Input>
<InvertInput>false</InvertInput>
</Rotator>
If the second rotor spins backward, change the second one to:
<InvertInput>true</InvertInput>
I hope it helps
And by the way did you try my first method. ?
@Postcommenter6969 in both rotators dude
did you put blasto j50 in the smaller rotor?
@Postcommenter6969 same rotation inut
@Postcommenter6969 dude I mean in blastoj50 dude
@Postcommenter6969 in XML in rotator input dude?
✅ Best Solution
Use the same rotor settings and control input for both rotors:
Rotator Settings
Input: VTOL
Max RPM: 2000
Min RPM: -2000
Make sure both rotators have identical settings.
✅ XML Code Fix
If he wants guaranteed equal RPM, use this XML and paste it into both rotors:
<Rotator>
<Speed>200</Speed>
<Input>VTOL</Input>
<InvertInput>false</InvertInput>
</Rotator>
If second rotor spins the wrong direction, just change this:
<InvertInput>true</InvertInput>
That keeps speed the same but flips direction.
Set both rotors to the same Speed value and use VTOL as the input. If one rotates backward, change InvertInput to true.